设为首页
|
收藏本站
|
联系我们
网站首页
企业概况
新闻动态
产品介绍
产品导航
行业标准
技术文章
配置方案
技能大赛
成功案例
企业博客
售后服务
联系我们
维修电工实训设备
高级技师电工实训设备
网孔板电工电子实训设备
工业自动化实训设备
PLC可编程实训设备
电机实训设备
高性能电工电子实验设备
工厂电气控制实训设备
单片机实训设备
计算机原理实训设备
电工电子实训设备
立式电工电子实训考核设备
模电数电实训设备
电子实训设备
柜式电工电拖实训设备
数电模电实验箱
光机电一体化实训设备
传感器实训设备
家用电器实训设备
电梯实训设备
光伏发电实训室设备
机械陈列柜
机械创新实训设备
液压传动实训设备
煤矿安全培训技能实训设备
环境工程实训设备
化工工程实训设备
化工原理实训设备
流体力学实训设备
新能源实训设备
过程控制实训设备
钳工实验室设备
工程制图实验室设备
热工实训设备
教学数控车床铣床实训设备
采暖通风实训设备
机床电气实训装置
数控维修实训室设备
透明注塑机模型
楼宇实训设备
汽车底盘实训室设备
物业管理实训室设备
汽车驾驶模拟器
汽车发动机实训设备
汽车发动机拆装台实训设备
汽车空调系统实训设备
汽车全车电器实验台
汽车变速器实训设备
暖通空调实训室设备
汽车解剖模型
制冷制热实训设备
消防实训室设备
汽车示教板
新能源汽车实训设备
新能源汽车电池实训室设备
部队.军校实训设备
船舶工程实训室设备
教学模型
汽车电路接线实训设备
心肺复苏模拟人
风力发电实训设备
新能源汽车电机驱动实训室
汽车电子实验箱
环境实验室实验设备
给排水工程处理实验室设备
工程机械实验设备
工业机器人应用实训室设备
农机工程机械实训设备
主页
>
新闻动态
>
气动机械手结构功能介绍及PLC控制系统的设计原理
2021-12-14
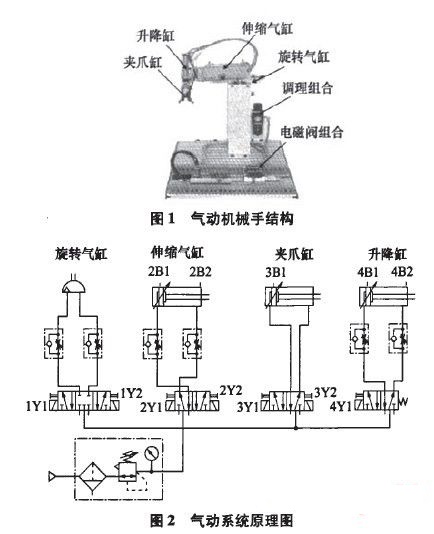
气动机械手结构功能介绍及PLC控制系统的设计原理
机械手广泛用于机械制造、冶金、电子和轻工等部门,其执行机构一般由液压、气动或电机来完成,由于气压技术以压缩空气为介质,结构简单、重量轻、动作迅速、平稳、可靠、节能,工作寿命长,特别是对环境没有污染、易于控制和维护,因此机械手的驱动系统常采用气动技术。
一、
气动机械手PLC控制
系统
结构和功能介绍
机械手的终端是一个气动夹爪,可以实现抓和放的动作,由一个双作用气缸和一个双电控电磁阀来完成控制;气动夹爪安装在一个垂直方向的双作用气缸上,能实现上升和下降动作,方向的控制由一个单电控的电磁阀来完成;垂直方向的气缸又安装在一个水平方向的伸缩气缸上,能实现伸出和缩回动作,水平双作用气缸由一个双电控的电磁阀完成;水平气缸再安装在一个双作用旋转气缸上,能实现左旋和右旋动作,我们希望它能停在活动范围的任意位置,因此选择了一个双电控的三位五通阀来控制。因此机械手的动作由4个电磁阀共7个控制点来实现其旋转、伸缩、上下和抓放的动作,其气动系统原理图。
另外,气动机械手的感知部分采用了这样一些信号开关:左右极限点各用1个电感式传感器,伸缩的前后极限点各采用了1个标准型的磁电开关,上下极限点也各采用磁电开关。这样这个机械手系统上就有了6个信号采集输入点。最后机械手再配上2个按钮,分别用于启动和停止。
二、
气动机械手
PLC控制系统
的设计
1.总体设计
PLC的运行是借助相关算法来实现物理量的输入与输出,以便获得工业生产所需数据信息,整个工作过程包括输入处理、执行程序和输出处理3个阶段,即一个扫描周期,扫描周期所需时间长短某种程度上决定了控制速度。
PLC开始运行之后,首先以扫描方式有序读取全部输入输出数据,并将读取到的内容存储到I/O对应的内部寄存器,在用户执行程序时,这些输入点在内部寄存器内的状态和数据一般是稳定的,而其他输出点则可能出现相应变化,当完成扫描工序后,PLC开始进行输出处理,此时CPU会根据内部寄存器内对应的状态和数据刷新,并更新到与内部寄存器对应的I/O口上,再经输出电路驱动相应的外设。PLC控制系统总体设计方案。
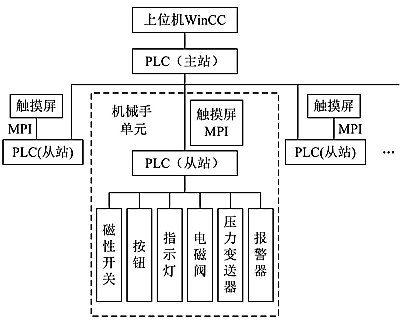
如图3 所示,整个控制系统由触摸屏、PLC、电磁阀、磁性开关、压力变送器、指示灯、报警器等元器件组成。PLC控制系统设计中,采用主站加从站的分布式控制模式,其功能分别是实现从站之间的数据通信,以及对各自控制单元的控制。在系统实现过程中,监控中心设置上位机,在上位机上基于WinCC 开发了对控制系统进行实时监控的监控系统,不同的从站点分别设置相应的触摸屏,以达到实时监控与显示控制单元控制状态的目的,机械手单元的控制系统选择的是从站PLC + 触摸屏的模式,前者可实现系统控制逻辑关系,后者则是方便
人机交互。
PLC控制方案
2.I/O端口的分配
根据机械手的工作状态和操作信息共需要11个输入量、8 个输出量,根据控制要求及端子数,本文选用西门子S7 - 200 系列的CPU226 AC /DC /RLY 型PLC,CPU226 AC /DC /RLY 具有24 点输入、16 点输出,I /O 点数共计40 点,它可以有7 个扩展模块,zui大可扩展248 点的输入/输出。X0~X7 分别代表手动、回原点、单步、运行、单周期、连续、启动、停止等8 个按钮; X20 ~ X27 分别代表左转、右转、伸出、缩回、提升、下降、夹紧、松开等8 个按钮; Y1 ~ Y7 分别代表左转、右转、伸出、缩回、提升、下降、夹紧、松开等8 个输出功能。
3.控制程序设计
控制程序作为PLC 控制的核心,其程序设计的关键将直接决定系统运行的好坏。本文采用模块化设计思想,即“化整为零”的方法,将机械手整个的控制程序分为公用程序、手动程序和自动程序3 大段,机械手运行时首先会执行公用程序,然后当选择手动工作方式(手动或单步)时,X0 或X2 会接通并跳至手动程序; 当选择自动工作方式( 单周期或连续) 时,X0 或X2 断开,而X3 或X4 会接通并跳至自动程序。
4.PLC 通讯实现
通讯是控制系统的重要组成部分。本文对通讯系统的设计采用S7 - 200,同时通讯驱动程序选择“STIMATIC S7- 200”。对系统的通讯来讲,其中触摸屏和PLC 的通讯通常包括MPI、DP 和以太网三种方式实现,而触摸屏接口可选择IFBI 接口和以太网接口,其中MPI、DP 通讯均通过IFBI 接口,而以太网通讯则通过以太网接口。本文结合上述的特点,选择IFBI 通讯接口,再选择MPI 通讯方式,PC 机、触摸屏、PLC 与zui高站的地址分别设置为0,1,2,3,PLC 的插槽与机架要和PLC 的硬件安装相对应。
三、
气动机械手
的基本形式
1.直角坐标式机械手
注塑形直角坐标式机械手是目前较为有代表性的机械手之一。其以空间直角坐标系OXYZ为设计基础,能够使机械手按一定顺序沿着空间直角坐标系的三个轴进行往返运动,使得机械手获得六个自动度的运行,往往应用于工作目标排列整齐,且工作位置排列成行的工作当中。部分工业制造企业也将直角坐标式机械手安置于传送带上,使两者相互配合使用。
直角坐标式机械手应用范围较广,且其本身便具备一定的优势,如CF75—10—c—p—fo型机械手。直角坐标式机械手具有以下特点:其一,生产量较高且频率较快,可以达到企业对机
械手速度方面的要求。其二,与生产流水线中的传送带配合较为默契,也能与加工装配机械进行配合。其三,能够完成工序繁琐的工作,如装箱,使用人员也能够轻易的变更定位。其四,定位精度较高,使用人员输入坐标之后,机械手便会自动工作,且定位精度不受物品载重的变化而发生改变。但直角坐标式机械手也存在一定缺点,即其作业范围较小,只能完成固定区域内的工作。
2.圆柱坐标式机械手
物料分拣机械手是立体仓库物料传送系统的重要组成部分,而大部分企业都选用圆柱坐标式机械手作为物料分拣机械手。圆柱坐标式机械手能够使气缸进行水平伸缩,同时也可以令气缸进行上下垂直运动,同时要求机械手能够左右旋转,并抓紧目标物料。企业往往使用圆柱坐标式机械手进行测量与搬运工作。
圆柱坐标式机械手具备许多优点:结构较为简易、占地面积小,工作范围广等。若设计人员将活动套筒安装于垂直导柱之上,机械手还可以实现在上下垂与水平面运动过程中,完成带有弧度的左右摆动的动作。
3.球坐标式机械手
以车桥附件焊接系统机器人,其不仅能够沿一个方向做直线运动,还可以以两个坐标轴为圆周进行旋转。球坐标式机械手拥有的自由度较大,在工业制造中的应用也较为频繁。球坐标式机械手能够完成如下动作:旋转、伸缩、弯曲、摆动等,对工业制造的发展具有积极意义。球坐标式的基本构造是将机械手安装于枢轴之上,之后将枢轴安装于叉形夹之上,以便机械手能够于垂直平面之内实现圆弧状上下运动,工作范围与工作效果几乎与人类相同。球坐标式机械手工作范围广、工作效率高,对我国工业制造企业的发展具有积极意义。
四、结束语
机械手的相关原理和PLC 开发技术,设计了基于PLC 的机械手控制系统,并从机械手结构、启动控制回路、PLC 控制设计等方面对系统进行了详细的设计,从而实现了手动/自动的多角度机械手运动控制,提高机械手控制精度,增强系统的实用性。
上一篇:
机械手组成原理功能特点及实训目的
下一篇:
光机电一体实训台组成与工作原理及部件的动作流程及程序设计思路
我们的优势:
品牌理念
标准流程
有效沟通
专业管理
客户视图
优秀团队
品质保证
无忧售后
上海茂育科教设备有限公司,立于上海,心怀天下
生产基地:上海松江叶榭工业园
业务电话:021-56311657 , 56411696 , 业务传真:021-56411696 公司邮箱:shanghaimaoyu@126.com
教学设备厂
沪公网安备 31010702001294 号
沪ICP备13020377号-1


 品牌理念
品牌理念  标准流程
标准流程  有效沟通
有效沟通 专业管理
专业管理 优秀团队
优秀团队 品质保证
品质保证 无忧售后
无忧售后 