设为首页
|
收藏本站
|
联系我们
网站首页
企业概况
新闻动态
产品介绍
产品导航
行业标准
技术文章
配置方案
技能大赛
成功案例
企业博客
售后服务
联系我们
维修电工实训设备
高级技师电工实训设备
网孔板电工电子实训设备
工业自动化实训设备
PLC可编程实训设备
电机实训设备
高性能电工电子实验设备
工厂电气控制实训设备
单片机实训设备
计算机原理实训设备
电工电子实训设备
立式电工电子实训考核设备
模电数电实训设备
电子实训设备
柜式电工电拖实训设备
数电模电实验箱
光机电一体化实训设备
传感器实训设备
家用电器实训设备
电梯实训设备
光伏发电实训室设备
机械陈列柜
机械创新实训设备
液压传动实训设备
煤矿安全培训技能实训设备
环境工程实训设备
化工工程实训设备
化工原理实训设备
流体力学实训设备
新能源实训设备
过程控制实训设备
钳工实验室设备
工程制图实验室设备
热工实训设备
教学数控车床铣床实训设备
采暖通风实训设备
机床电气实训装置
数控维修实训室设备
透明注塑机模型
楼宇实训设备
汽车底盘实训室设备
物业管理实训室设备
汽车驾驶模拟器
汽车发动机实训设备
汽车发动机拆装台实训设备
汽车空调系统实训设备
汽车全车电器实验台
汽车变速器实训设备
暖通空调实训室设备
汽车解剖模型
制冷制热实训设备
消防实训室设备
汽车示教板
新能源汽车实训设备
新能源汽车电池实训室设备
部队.军校实训设备
船舶工程实训室设备
教学模型
汽车电路接线实训设备
心肺复苏模拟人
风力发电实训设备
新能源汽车电机驱动实训室
汽车电子实验箱
环境实验室实验设备
给排水工程处理实验室设备
工程机械实验设备
工业机器人应用实训室设备
农机工程机械实训设备
主页
>
新闻动态
>
机械手组成原理功能特点及实训目的
2021-12-14
机械手组成原理功能特点及实训目的
机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
一、
机械手
的组成原理
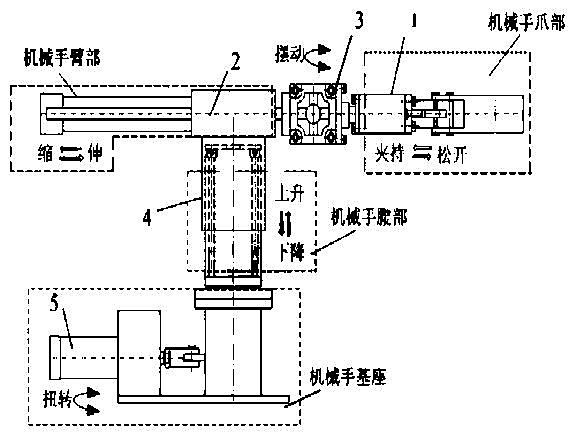
机械手主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
二、
机械手
功能特点
1.机械手的横轴和竖轴的机械传动采用高精密的滚珠丝杆,高精密的光杆导轨和直线轴承,配以先进地机械设计、精密的机械加工及装配,可使机械手臂非常平稳地进行垂直和水平移动和水平方向旋转及精确位置控制;
2.采用先进的步进电机做为横轴和竖轴的动力源,可实现0.45 度的细分;
3.机械手臂和机械手爪水平方向旋转采用高级减速直流电机传动,配置光电传感器及码盘,可实现旋转方向的精确位置控制;
4.机械手爪采用高精度气动式手爪、配置高级电磁位置形状及两位三通电磁阀,可实现快速准确地抓取和放开动作;
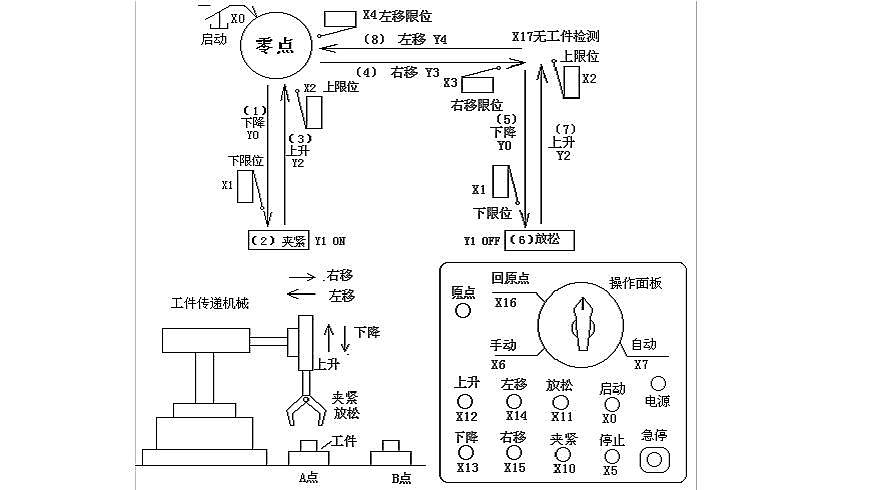
5.采用晶体式PLC可编程控制器作为控制主机,配置旋转编码器及传感器,可实现PLC高级指令编程、旋转编码器、光电传感器的技术应用;
6.PLC各I/O点和传感器、电机、各电器的连接线都接在一块接线板上的接线排上,学生可根据PLC程序和各电器的技术要求进行现场接线操作实训,培训学生实际动手接线能力;
7.配套铝钢式机械手台架,台面、竖轴及横轴采用经氧化处理的铝型材,而台架的侧面及底面采用1mm厚度经烤漆处理的钢板,台架与地面之间采用带自锁功能的万向轮,使整个台架不但坚固耐用而且移动方便;
8.下面台架台面下部左三分之一处安装可编程控制器及电源箱,其余部分安装可做80度翻转的机械机构,上安装有步进电机驱动器、继电器及接线排和接线槽的接线板,用于学生的实际接线,而翻转机构可将接线板能够方便地放置到水平位置和垂直位置,不但方便学生的实训而且节省了设备所占用的空间。
三、
机械手
实训的目的:
1.在可编程控制器方面,可进行从初级到高级指令编程实训;
2.步进电机应用技术的掌握和实训;
3.光电传感器应用技能的掌握和实训;
4.配置开放式旋转编码器,学生不但可以直接观看到旋转编码器的结构,而且还可以进行应用技能的实训;
5.气动技术应用的掌握和实训;
6.开环位置控制和闭环精确位置控制实训;
7.精密机械传动技术应用知识的掌握;
四、
机械手
实训项目:
1.机械:装置的机械安装与位置调整;
2.电气:电器元件的布线,执行电机的选用;
3.传感器:微型光电开关的选择与应用;
4.PLC:PLC控制驱动器的编程及应用。
5.送料机构控制实验
6.十字机械手点动控制实验
7.十字机械手三维精准定位实验
8.十字机械手取物体实验
9.十字机械手放物体实验
10.十字机械手单循环搬动物体实验
五、结束语
随着网络技巧的发展,机械手的联网操作问题也是以后发展的方向。工业机器人是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
上一篇:
中央空调模型实训台的设计组成功能原理与自控系统的构成
下一篇:
气动机械手结构功能介绍及PLC控制系统的设计原理
我们的优势:
品牌理念
标准流程
有效沟通
专业管理
客户视图
优秀团队
品质保证
无忧售后
上海茂育科教设备有限公司,立于上海,心怀天下
生产基地:上海松江叶榭工业园
业务电话:021-56311657 , 56411696 , 业务传真:021-56411696 公司邮箱:shanghaimaoyu@126.com
教学设备厂
沪公网安备 31010702001294 号
沪ICP备13020377号-1



 品牌理念
品牌理念  标准流程
标准流程  有效沟通
有效沟通 专业管理
专业管理 优秀团队
优秀团队 品质保证
品质保证 无忧售后
无忧售后 