电动葫芦电气控制电路实验
电动葫芦电气控制电路实验-实验目的:
1、学习并掌握电动葫芦的提升和移行机构电气控制的方法。
2、学习用限位开关对三相异步电动机进行能耗制动并观察其制动效果。
二、选用组件:
1、实验设备
|
序 号 |
型 号 |
名 称 |
数 量 |
|
1 |
DQ39 |
继电接触控制挂箱(一) |
1件 |
|
2 |
DQ39-1 |
继电接触控制挂箱(二) |
1件 |
|
3 |
DQ39-2 |
继电接触控制挂箱(三) |
1件 |
|
4 |
DQ10 |
三相鼠笼异步电动机(△/220V) |
1件 |
|
5 |
DQ18 |
三相双速异步电动机(低速) |
1件 |
2、屏上挂件排列顺序
DQ39、DQ39-1、DQ39-2
三、实验方法:
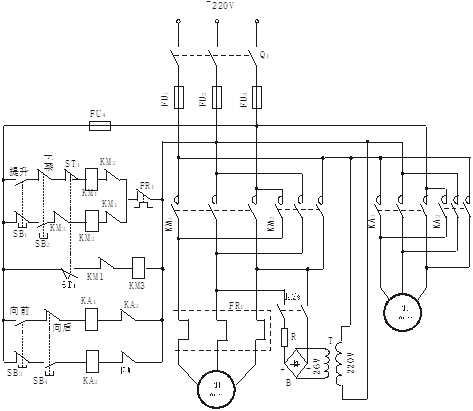
图1电动葫芦控制电路图
1、调节三相可调输出线电压220V,按下“关”按钮,按图7-23接线。图中SB
1、SB
2、SB
3、KM
1、KM
2、KM
3、FR
1、T、B、R选用DQ39挂件,Q
1、FU
1、FU
2、FU
3、FU
4、KA
1、KA
2、SB
4、ST
1选用DQ39-1挂件。M
1选用DQ10电机,M
2选用DQ18电机。先对热继电器的整定电流进行调整,调整在M
1三相鼠笼式异步电动机的额定电流0.5A位置。
2、M
1异步电动机装在导轨上,M
2鼠笼电动机放在实验桌的台面上,分别模拟升降、移行电动机。
3、线路连接完成,经指导教师检查无误后,方可按下列步骤进行通电实验。假定电动机M
1提升为顺时针转向,电动机M
2向前移行为顺时针转
向,则按SB
1及SB
3应符合转向要求,若不符合要求,应调整相序使电机转向符合顺时针的假定要求。
4、按SB
2及SB
4、M
1及M
2的转向应符合逆时针转向要求,在电机M
1 运转的状态下,按ST
1即对电机能耗制动,观察电机应很快停转,以模拟实际电葫芦的升降电动机停机时,必须有制动电磁铁(即抱闸)将其轴卡住,能使重物悬挂在空中。
5、再次操作各按钮,先按SB
2,M
1电机逆时针转向(下降),再按SB
3,M
2电机顺时针转向(向前),改为按SB
4,M
2电机逆时针转向(向后),松开各按钮,电机应停止运转;按SB
1,M1电机顺时针运转 (提升),按10秒钟(模拟电机已提升到最高位),此时按ST
1 (模拟提升到最高位碰撞限位开关ST
1), 电机应很快停止运转。
6、为了在实际操作中保证安全,要求每次只按下一个按钮, 以使重物升降时不作移行运行,或在移行运行时不使重物作升降运动。也可设想在电路中加联锁使操作更安全。
四、电动葫芦电气控制电路实验讨论题:
(1)为什么在电动葫芦控制电路中,按钮要采用点动控制?
(2)在图中,行程开关ST
1起到什么作用?


 沪公网安备 31010702001294 号
沪公网安备 31010702001294 号