设为首页
|
收藏本站
|
联系我们
网站首页
企业概况
新闻动态
产品介绍
产品导航
行业标准
技术文章
配置方案
技能大赛
成功案例
企业博客
售后服务
联系我们
维修电工实训设备
高级技师电工实训设备
网孔板电工电子实训设备
工业自动化实训设备
PLC可编程实训设备
电机实训设备
高性能电工电子实验设备
工厂电气控制实训设备
单片机实训设备
计算机原理实训设备
电工电子实训设备
立式电工电子实训考核设备
模电数电实训设备
电子实训设备
柜式电工电拖实训设备
数电模电实验箱
光机电一体化实训设备
传感器实训设备
家用电器实训设备
电梯实训设备
光伏发电实训室设备
机械陈列柜
机械创新实训设备
液压传动实训设备
煤矿安全培训技能实训设备
环境工程实训设备
化工工程实训设备
化工原理实训设备
流体力学实训设备
新能源实训设备
过程控制实训设备
钳工实验室设备
工程制图实验室设备
热工实训设备
教学数控车床铣床实训设备
采暖通风实训设备
机床电气实训装置
数控维修实训室设备
透明注塑机模型
楼宇实训设备
汽车底盘实训室设备
物业管理实训室设备
汽车驾驶模拟器
汽车发动机实训设备
汽车发动机拆装台实训设备
汽车空调系统实训设备
汽车全车电器实验台
汽车变速器实训设备
暖通空调实训室设备
汽车解剖模型
制冷制热实训设备
消防实训室设备
汽车示教板
新能源汽车实训设备
新能源汽车电池实训室设备
部队.军校实训设备
船舶工程实训室设备
教学模型
汽车电路接线实训设备
气动实训室设备
风力发电实训设备
新能源汽车电机驱动实训室
汽车电子实验箱
环境实验室实验设备
给排水工程处理实验室设备
工程机械实验设备
工业机器人应用实训室设备
农机工程机械实训设备
主页
>
技术文章
>
传送带PLC控制系统设计
2025-07-24
传送带PLC控制系统设计
随着科技的飞速发展,无论在日常生活中,还是在工农业发展中,PLC具有广泛的应用。
传送带PLC控制系统设计
-
PLC的一般特点:抗干扰能力强,可靠性极高、编程简单方便、使用方便、维护方便、设计、施工、调试周期短、易于实现机电一体化。PLC总的发展趋势是:高功能、高速度、高集成度、大容量、小体积、低成本、通信组网能力强。
可编程控制器(简称PLC)由于其将系统的继电器技术,计算机技术和通信技术融为一体,以及其可靠性高、稳定性好、抗干扰能力强,以及编程简单,维护方便,通讯灵活等众多优点,广泛应用于工业生产过程和自动控制中。PLC不仅能实现复杂的逻辑控制,还能完成定时、计算和各种闭环控制功能。
设置性能完善质量可靠、技术先进的可编程控制器PLC控制皮带运输系统,可以实现高自动化的传送带机的集中控制及保护。而对于基于PLC的传送带的研究和设计正是目前工业生产中所需要的。
本次是应用S7-200PLC控制四节传送带系统的硬件电路,并利用OB1的梯形图控制程序设计。
通过控制S7-200 PLC的定时继电器的功能来实现四条皮带的运行。它以成本低、大量节省人力、物力、财力、故障少、可靠性高、工作寿命长为优势,具有很强的竞争力。
四节传送带的功能
生产生活中,很多地方会用到皮带传送,如粮站运送粮食、工矿企业运送石料,给人们带来了很大方便,既省时又省力。随着PLC控制技术的普及,大大提高了皮带传送系统的可靠性,减少了控制装置的体积,维修维护也更加方便
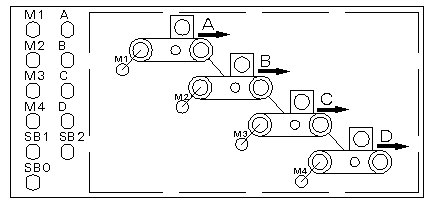
按钮分配和实物模型如下:
要求:
1.四台皮带传送机分别由4台交流电动机M1、M2、M3、M4拖动,按下启动按钮后,为了减少4台电动机同时启动对电网造成的冲击,应该按照物料传送方向逆序启动,启动顺序为M4、M3、M2、M1.启动间隔5秒。
2.为防止物料在皮带上滞留,应按照物料传送方向顺序停车,停止顺序为M1、M2、M3、M4,间隔5秒。
3.当某条皮带机故障时,该皮带机及前面的皮带机立即停止,而后面的皮带机待料运完后自动间隔停止(5秒)
4.发生紧急情况时,可按紧急停车按钮,电动机M1、M2、M3、M4同时停车。
注:故障设置可用开关来模拟,电机的停止和运行用灯泡或者发光二极管来模拟。
分析:
启动时先按下SB1按钮,起动最末一条皮带机,经过5秒延时,再依次起动其他皮带机。
停止时按下SB2按钮,最前一条皮带机先停止,待料运送完毕后(5s)
再依次停止其它皮带机。
A、B、C、D为故障模拟按钮,分别模拟M1、M2、M3、M4发生故障时的情况。例如:当要模拟M1条皮带机发生故障时,只需按下按钮A即可,此时该皮带机立即停止工作,而该皮带机以后的皮带机分别间隔5秒再依次停止工作:M2在M1停止工作后5秒以后再停止(将本皮带上的货物运送待运完后才停止)。M3在M2停止工作后5秒以后再停止。往后依次类推。当M2发生故障时,M1皮带机立即停止工作,而M2以后的皮带机则依次间隔5秒以后再停止工作。M3、M4发生故障时情况与此相同。
停止时只需按下按钮SB2,这时M1皮带先停止工作,然后M2、M3、M4依次停止工作。
发生紧急情况时,可按紧急SB0停车按钮,电动机M1、M2、M3、M4同时停车。
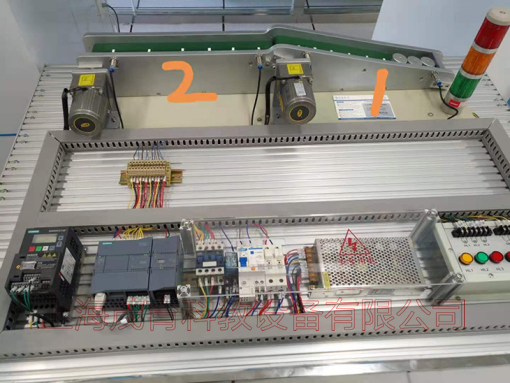
系统硬件分析
PLC四节传送带的硬件系统是由PC机、四台电机、西门子PLC200等构成。使用PLC进行控制,可以有效的解决多节传送带复杂的分段控制问题,通过电脑将软件系统下载进入PLC中,同时利用总线接入四台电机,通过软件的设计,实现四台电机顺序启动停止,并且在其某一段上面有重物时,实现一个分段的停止,从而达到节能的目的。在本设计系统中,PLC时控制核心,外部多种输入信号如启动、停止,包括其中重物的反馈等信号采样进来,经过PLC内部进行程序的运算和数据处理后,提供多种输出信号来控制四台电机的运作。
PLC的硬件接线图如图2-1所示。
电机选择
选择电机应考虑以下因素:
1、为电机提供电源的种类,如单相、三相、直流电等
2、电机的工作环境,电机工作场所是否有特殊性,如潮湿、高温、化学腐蚀、粉尘等
3、电机的工作方式,是连续工作还是短时工作或是其它工作方式
4、电机的安装方式,如立式安装、卧式安装等等
5、电机的功率及转速等,功率及转速应满足负载的要求
6、其它困素,如是否需要变速、有无特殊控制要求、负载的种类等
由于本设计是带动传送带电机,所以选择三相异步笼型电动机即可,功率选择0.75Kw,额定转速2900r/min,效率86.2%,功率因数0.88.
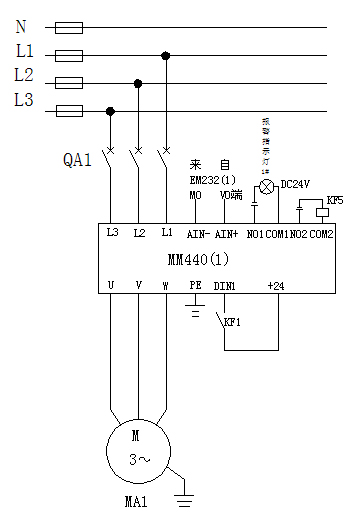
3.2.2变频器选择
MM440变频器的控制电路由CPU、模拟量输入/输出、数字输入/输出、操作面板等部分组成。该变频器共有20多个控制端子,分为4类:输入信号端子、频率模拟设定输入端子、监视信号输出端子和通信端子。
MM440变频器可以通过6个数字输入端口对电动机进行正反转运行、正反转点动运行方向控制.可通过基本操作板,按频率调节按键可增加和减少输出频率,从而设置正反向转速的大小。也可以由模拟输入端控制电动机转速的大小。其型号种类繁多,额定功率从120W到200Kw(恒定转矩CT控制方式),或者可达250Kw(可变转矩VT控制方式),供用户选择。
本变频器由微处理器控制,并采用具有现代先进技术水平的绝缘栅双极型(IGBT)晶体管作为功率输出器件,因此它们具有很高的运行可靠性和功能多样性。采用脉冲频率可选的专用脉宽调制技术,可使电动机低噪声运行。全面而完善的保护功能为变频器和电机提供了良好的保护。
图3.2 电机主线路图
3.2.2:检测元件选型
传感器的选型应根据应用情况入手,从传感器支撑点的数量、量程、精度等级、环境适应性等几个方面进行选择。
3.3.1传感器量程的选择
根据经验,一般应使传感器工作在其30%-70%量程范围内,但对于一些在使用过程中存在较大冲击力的衡器,如动态轨道衡、动态汽车衡、钢材秤等,在选用传感器时,一般要扩大其量程,使传感器工作在其量程的20%-40%范围内,使传感器的称量储备量增大,以保证传感器的使用安全和寿命,避免超载。
按照使用量程60%-70%的建议,假设传感器个数为N,单只传感器量程为m,料仓自重加上满料重量的总重为,则在已知M和N的情况下,按如公式(3-1)计算m:
M/(0.7×N)≤m≤M/(0.6×N) (3-1)
确定此范围后,在传感器规格里面选择满足此规格的传感器即可。
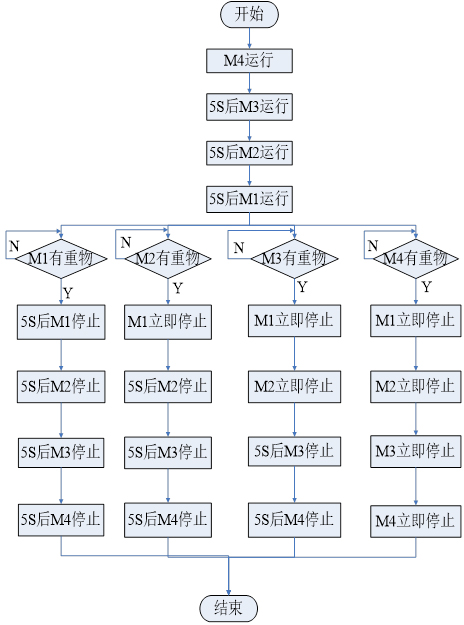
4.1:本设计的具体控制流程如图
程序设计的总体思路是:先将皮带传送系统的正常的连锁起动和连锁停止用S7200编程软件设计出来,在其基础上添加故障处理控制,由于都是定时控制,因此用到许多PLC内部时间继电器,同时为了程序能够简介美观,也用到很多PLC内部软
元件作为中间过渡。
4.2:I/O分配表
输入信号
输出信号
启动按钮SB1
I0.0
M1
Q0.1
停止按钮SB2
I0.5
M2
Q0.2
A
I0.1
M3
Q0.3
B
I0.2
M4
Q0.4
C
I0.3
D
I0.4
拨动开关I1.1
I1.1
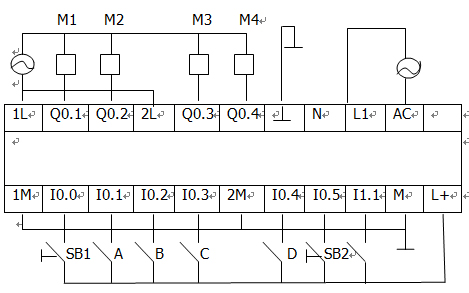
M1、M2、M3、M4分别接主机的输出点Q0.1、Q0.2、Q0.3、Q0.4;SB1、SB2分别接主机的输入点I0.0、I0.5;表示故障或重物设定的A、B、C、D分别接主机的输入点I0.1、I0.2、I0.3、I0.4。启动用按钮SB1实现,停止用按钮SB2实现。故障或重物设置用拨动开关I1.1来模拟,电机的停转或运行用发光二级管来模拟。
4.3:I/O接线图
其他产品链接:
加强中职学生对弱电与强电认识
好氧堆肥实验装置使用说明
电机及电气技术实训装置
传感器实验台温度控制仪表操作说明
太阳能光伏发电综合实训系统使用说明
电动机技术工作原理及运行维护
电机与拖动实验实训报告
光机电一体化实训设备实验室介绍
机械设计实验室
齿轮范成仪使用说明书
基础电工电子实验室设备
定制热管换热器实验台
家用电器之电子消毒柜实验指导书
物联网射频识别综合应用实验箱
初级维修电工实验台
臭氧氧化脱色实验说明书
萃取精馏教学实验指导书
二氧化碳PVT关系测定实验指导书
空气绝热指数测定装置实验指导书
填料吸收实验装置使用指导书
超滤、纳滤、反渗透多功能膜分离实验装置说明
孔口管嘴实验仪说明书
热电偶制作校验仪说明书
好氧堆肥实验装置实验说明书
沿程阻力系数测定装置说明书
文丘里除尘器性能实验指导书
制冷压缩机性能测试实训装置指导书
化工传热实验装置使用说明书
数据采集板式静电除尘器指导书
太阳能光伏发电综合实训系统使用说明
《台虎钳》实测绘图组合训练装置
自由对流横管管外放热系数测试装置使用说明书
流体力学综合实验装置使用说明书
《典型零件》实测绘图训练装置
制冷制热工作原理及实验目的
挖掘机液压模拟训练平台操作说明
中温法向辐射率测量仪实验装置的介绍及使用说明
传感器实验台的特点及维护
热电偶校验仪使用说明
热电阻校验装置使用说明
做燃料电池教具实验要注意什么
电机及电气技术实验的基本要求及安全操作规程
交流及直流电源实验操作说明
传感器实验台温度控制仪表操作说明
上一篇:
一机二库冷库实训装置膨胀阀的结构和工作原理
下一篇:
流动实训车技术方案,流动实训车各专业设备
Copyright © 2026 上海茂育科教设备有限公司 版权所有
沪公网安备 31010702001294 号
沪ICP备13020377号-1
生产基地:上海松江叶榭工业园
业务咨询:021-56311657
工作传真:021-56411696
公司邮箱:shanghaimaoyu@126.com


 沪公网安备 31010702001294 号
沪公网安备 31010702001294 号